This script provides a GUI to play motion plans stored as JSON files in the
plans/ folder. Each plan provides a sequence of contacts, step durations
and reference ZMP positions at the end of the step, from which controls are
inferred by QP optimization.
To run the motion editor, you will need to launch the associated ROS services:
roslaunch contact_stability all.launchOnce the service is up and running, you can run the scenario used in the paper (Section V.B) by:
python motion_editor.py plans/long-stride.jsonTwo windows should pop up: the OpenRAVE GUI, and a side panel:
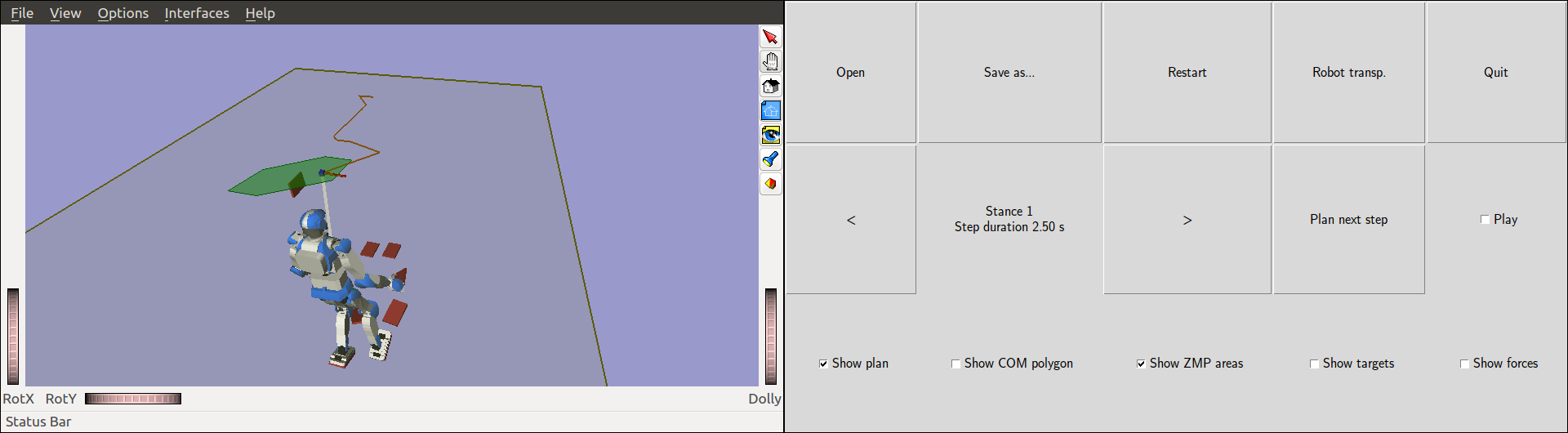
The side panel includes the following buttons:
- Open: open a new model plan from a JSON file (see plans/ for examples)
- Save as: save current plan in a different JSON file
- Restart: reload plan and reset robot configuration
- Robot transp.: change robot transparency between opaque, transparent and hidden
- Quit: clear
- <: rewind to the previous stance in the plan
- >: fast-forward to the next stance in the plan
- Plan next step (in Step mode): finish current step and go to Plan mode; this mode allows you to edit the targets (contact locations, target ZMP) of the next step
- Step (in Plan mode): exit Plan mode and execute the step
- Play: when checked, skips Plan mode at the end of a step and execute the plan without interruption
- Show plan: show the initial motion plan in ZMP plane
- Show COM polygon: show the static-equilibrium COM area
- Show ZMP areas: show both the full and pendular ZMP support areas
- Show targets (in Plan mode): shows targets (contact locations, target ZMP) for the next step in cyan
- Show forces: validate contact-stability of the motion by computing supporting contact forces
Motion plans distributed in the plans/ folder were found for HRP-4, however we do not release its model (copyright issue). We replaced it by JVRC-1, which has the same kinematic structure but different mass-geometry (in particular, its center of mass is higher). The plans were not updated to account for this change in model.