{kind=link}
This repository provides the example dataset of spherical images used to illustrate the spherical framework of the ScanVan Project that deduces three dimensional models from the images. Its contains the images dataset, the YAML configuration file needed to run the framework on the images and all the obtained framework results, including the framework logs.
The ScanVan Project was funded by the Swiss National Science Foundation (SNF, PNR 76 Big Data) and won by the DHLAB of EPFL and the HES-SO Valais Wallis. The goal of the project was to demonstrate the possibility of city mass and continuous digitization using central spherical cameras. Using such device allows to simplify the 3D structures computation and to drastically decrease the complexity of images acquisition.
The EPFL team realized the theoretical design of the camera and defined a new pose estimation algorithm able to be applied to the case of images acquired by such device. The HES-SO Valais Wallis were in charge of translating the theoretic design of the camera into a physical device achieving the centrality. The codes implementation, validation and testing was shared between the two teams.
Summary of the ScanVan Project codes :
- Camera calibration
- Camera images acquisition
- Camera images debayering
- Panoramic images computation
- Structure from spheres framework
- Spherical dataset example
These codes and the physical camera give access to a full city digitization pipeline. Other codes were implemented during the research phase and can be found here.
The following images give an overview of the spherical image dataset content. The spherical image are obtained using the spherical central camera built during the ScanVan project.

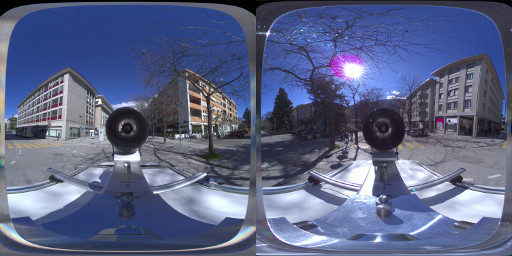
Illustration of the spherical images dataset
The following image gives a view of the central spherical camera built during the project and used to produce the dataset of images :

Central spherical camera prototype
The five images of this dataset, located in the image directory, are stored in portable network graphic format. The configuration YAML file is located in the root directory and named config.yaml. The mask image, provided to the pipeline to discard the camera and vehicle related pixel is located also in the root directory and is named mask.png.
The output directory stores all the outputs created by the framework when applied on this dataset, including the logs located in the logs file. For both sparse and dense modes, four files are created in the output directory :
- sparse/dense_constraint.dat
- sparse/dense_position.xyz
- sparse/dense_structure.xyz
- sparse/dense_transformation.dat
The position model file contains the computed position of the images in the frame of the first image. The structure model file contains all the point place during sparse or dense computation. The structure file then contains the model itself.
The transformation file contains the position and orientation of each image, line by line, expressed in the frame of the first camera. Each line contains the name of the image, the position of the image and its orientation matrix. The constraint file contains all the three dimensional points placed during the computation along with their color, the amount of image it is seen from and the index of these images, again, line by line.
Finally, in the dense and sparse folders, you will find this four files kept for each step of the framework. Each time an image is added, a copy of these four files is kept and stored in these two folders.
Using the provided images and the provided configuration YAML file, you should obtain the following sparse model :


Example of sparse model obtain with a sequence of five spherical images
and the following dense model :


Example of dense model obtain with a sequence of five spherical images
This dataset should allow you to reproduce our results and train you to apply the framework on your own images.
sfs-framework-example - Nils Hamel, Charles Papon, Marcelo Kaihara
Copyright (c) 2018-2020 DHLAB, EPFL & HES-SO Valais-Wallis
Documentation, content and illustrations are licensed under the terms of the CC BY 4.0