Wrapper around Quadratic Programming (QP) solvers in Python, with a unified interface.
The simplest way to install this module is:
# Python 2
sudo apt install python-dev
pip install qpsolvers
# Python 3
sudo apt install python3-dev
pip3 install qpsolversYou can add the --user parameter for a user-only installation. See also the
documentation for
advanced installation instructions.
The function solve_qp(P, q, G, h, A, b, lb, ub) is called with the solver
keyword argument to select the backend solver. The quadratic program it solves
is, in standard form:

Vector inequalities are taken coordinate by coordinate.
To solve a quadratic program, simply build the matrices that define it and call
the solve_qp function:
from numpy import array, dot
from qpsolvers import solve_qp
M = array([[1., 2., 0.], [-8., 3., 2.], [0., 1., 1.]])
P = dot(M.T, M) # quick way to build a symmetric matrix
q = dot(array([3., 2., 3.]), M).reshape((3,))
G = array([[1., 2., 1.], [2., 0., 1.], [-1., 2., -1.]])
h = array([3., 2., -2.]).reshape((3,))
A = array([1., 1., 1.])
b = array([1.])
x = solve_qp(P, q, G, h, A, b)
print("QP solution: x = {}".format(x))This example outputs the solution [0.30769231, -0.69230769, 1.38461538].
The list of supported solvers currently includes:
- Can I print the list of solvers available on my machine?
- Absolutely:
print(qpsolvers.available_solvers)
- Absolutely:
- Is it possible to solve a least squares rather than a quadratic program?
- Yes,
qpsolversalso provides a solve_ls function.
- Yes,
- I have a squared norm in my cost function, how can I apply a QP solver to my problem?
- You can cast squared norms to QP matrices and feed the result to
solve_qp.
- You can cast squared norms to QP matrices and feed the result to
On a dense problem, the performance of all solvers
(as measured by IPython's %timeit on my machine) is:
| Solver | Type | Time (ms) |
|---|---|---|
| quadprog | Dense | 0.02 |
| qpoases | Dense | 0.03 |
| osqp | Sparse | 0.04 |
| ecos | Sparse | 0.34 |
| cvxopt | Dense | 0.46 |
| gurobi | Sparse | 0.84 |
| cvxpy | Sparse | 3.40 |
| mosek | Sparse | 7.17 |
On a sparse problem, these performances become:
| Solver | Type | Time (ms) |
|---|---|---|
| osqp | Sparse | 1 |
| mosek | Sparse | 17 |
| ecos | Sparse | 21 |
| cvxopt | Dense | 186 |
| gurobi | Sparse | 221 |
| quadprog | Dense | 550 |
| cvxpy | Sparse | 654 |
| qpoases | Dense | 2250 |
Finally, here are the results on a benchmark of random problems (each data point corresponds to an average over 10 runs):
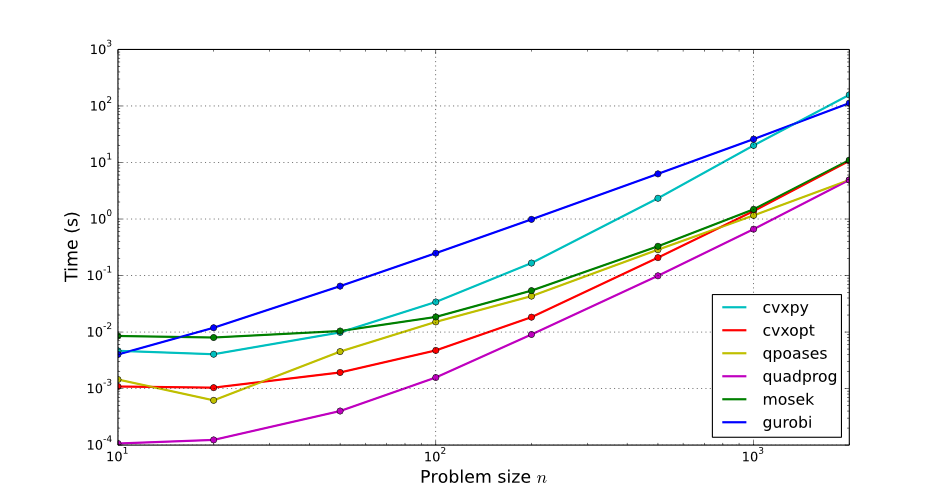
Note that performances of QP solvers largely depend on the problem solved. For instance, MOSEK performs an automatic conversion to Second-Order Cone Programming (SOCP) which the documentation advises bypassing for better performance. Similarly, ECOS reformulates from QP to SOCP and works best on small problems.