Mathematical weakness if a edge line points directly in the center #5
Comments
|
Hi furun, I believe (0,0,0) point is the point at infinity, not the point in the center. Jenn3D maps the 3-sphere S^3 onto euclidean space + a point at infinity (which is not drawn). The The purpose of noise in |
|
Tanks very much fritzo for the replay! To explain how this question come up... I made a little optimisation in r3_norm(). Then i was surprised to see no Edges anymore at the corners in a Hypercube (4,2,2,3,2,3;2,3,4). (I teached math to my self, this code is a bit about my level ;-) |
|
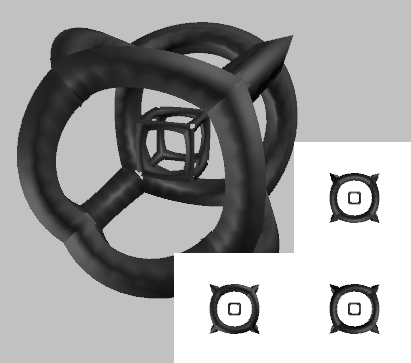
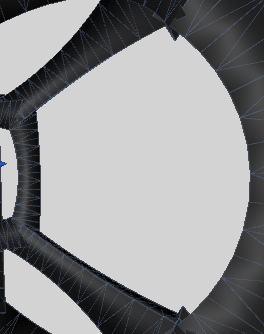
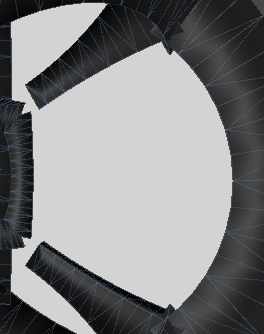
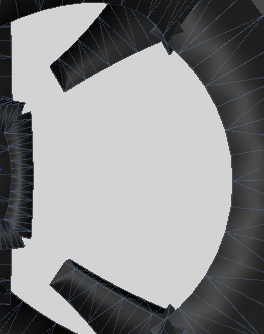
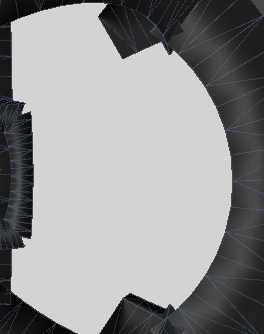
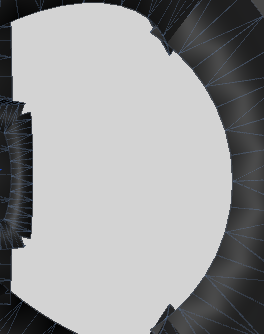
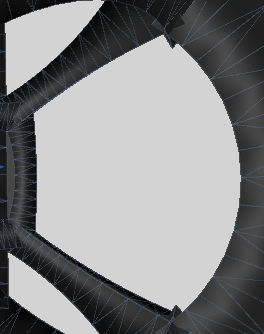
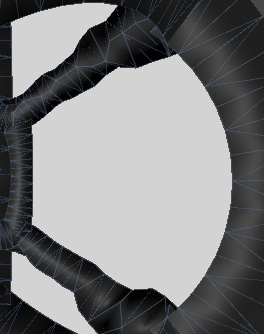
So much i understand, are no points or edges in infinity in a Hypercube on start position. Here a illustration of the problem. Noise=0, modified r3_normal() function: In drift Noise=0, original r3_normal() function: In drift (Why the effort? It is one of the most coolest math software i know :-) |
|
Cool, yes that looks like a bug indeed! Also, you can switch to wireframe You're right that in the projection of the hypercube you're examining, Let me know if you find a fix! On Jul 20, 2016 6:00 AM, "furun" [email protected] wrote:
|
|
OK... i tray, but don't laugh, like i said, i have not study math at uni, only self learnt skills. I speculate that the cross product for normal and binormal has to be done in 4D space, for this stereo_project. Do you have a tip? In case me idea is right. (Probable the wobbly tube can be fixed in a similar way.) |
|
I understand the problem a bit better now. (Jenn crashes internally, the objects disappears from screen. This happens after some minutes, wenn one of the 1/0 situations happen.) In the stereographic projection is the only situation wenn edges has no curvatures, if they point straight to the center. every other edge will have a curvature. I found no math solution jet. Maybe there is non(?) |
|
Great deubgging, that sounds plausible to me. I think it's fine to add special handling around zero for the normal and binormal vectors. What if you do something like:
|
|
I think this is the best solution for now. To use adjoining edges like i supposed before, did not work either. At least not so easy. (Tanks for this code! i spend now quite some free time with it.) |
I ask just for curiosity.
Is there a clean mathematical way to solve the following problem?
There is a Mathematical weakness if a edge line points directly in the center.
So if the two points of a edge are in a straight line to the center (0,0,0).
I speculate, it is the reason for the noise used in Animate::Animate(), to prevent that edge lines point directly in to the center.
For example:
In this code part the resolut for n b is infinite/NaN, because r3_norm(N) and r3_norm(B) result is 0, if the edge line points to center.
Or the Edge tube of such edges gets wobbly because it misses the adjustment.
The text was updated successfully, but these errors were encountered: