


👋 Hi There, I'm Rohit Gupta a Multi-skilled engineer with a passion for building Intelligent and Autonomous Systems. I enjoy tackling complex challenges in these fields. I'm committed to lifelong learning and constantly exploring new frontiers in emerging technologies.

- 👨💻 Currently I am working on projects related to Autonomous systems, Advance Control, Computer Vision and Robotics
- 💻 I Love to build, code and I'm in the Top 3.72% on LeetCode (Global Ranking: 15k out of 4.6 Lakh Active Programmers)
- 📚 I'm currently learning about Control Theory, Rust, and Vision Transformers
- 💡 I’m curious about Liquid Neural Networks, Occupancy Grids and Dynamic Nerfs
- 🤝 I'm open for collaborations on above topics
- 📄 Know about my education and experiences Resume

🎓 MSc in Automation Control & Robotics at Sheffield Hallam University United Kingdom (Jan 2023 - Jun 2024)
🎓 Masters in Aerospace and Astronautical Engineering from University of Bologna, Italy (Nov 2016 - Oct 2019)
| Projects | Description | Preview |
|---|---|---|
| Autonomous Car Parking Model Predictive Controller | This project demonstrates how a Model Predictive Controller (MPC) can be employed to control a car's movements during parking. |  |
| MULTI-SENSOR FUSION ADAPTIVE FILTERING (IMM) FOR AUTONOMOUS SURFACE VEHICLE NAVIGATION | This thesis presents an efficient multi-sensor data fusion algorithm based on Interacting multiple models (IMM) for autonomous surface vehicle (ASV) navigation |  |
| Car Obstacle Avoidance | This project simulates obstacle avoidance using a Model Predictive Controller (MPC) implemented in Python. The MPC predicts the vehicle's future states, including position and orientation, and calculates control inputs (acceleration and steering) to achieve precise maneuvering. |  |
| Mobile Robots Navigation Design and Implementation | This project focuses on simulating 4 robots in a warehouse environment. The robots are responsible for delivering a load (e.g. books, parts, or products) to different stations. The navigation involves coordinating the movement of four autonomous robots, guiding them from loading stations to an unloading station. The warehouse setting presents a mix of static and dynamic obstacles. | 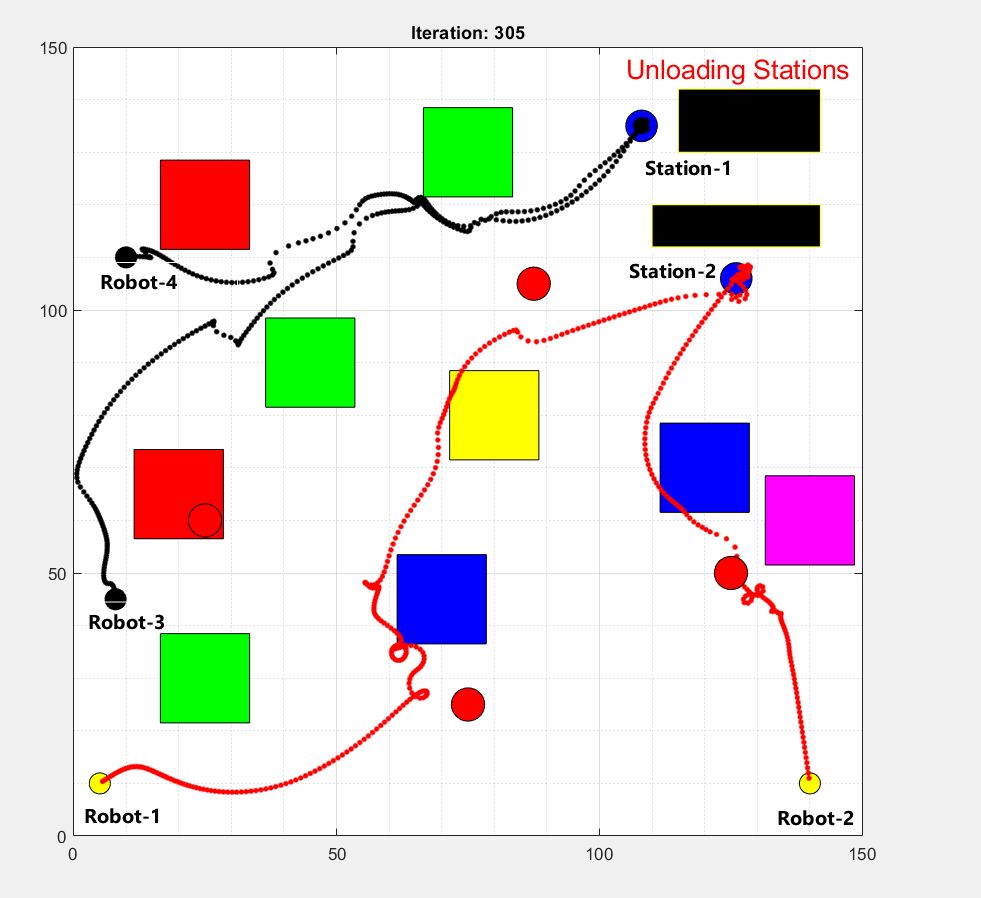 |
| 1D Kalman Filter | This is a Python project that simulates the behavior of a Autonomous car using 1D Kalman filter by tracking its position and velocity. |  |
| Fault Detection and Isolation | In this project, we simulate a given discrete state-space plant (single-input and two-outputs model) in Matlab and Simulink. |  |
| Altitude Airspeed Autopilot LQR & PID | The Autopilot is designed to hold a reference altitude and airspeed, simulating cruise conditions for Piper PA30 Aircraft. |  |
| Systems on Chip Projects |  |
|
| WebApp Semantic Segmentation | ||
| Computer Vision |  |
|
| 2D Kalman Filter Traffic Light Prediction |  |
|
| Machine Learning Projects | Machine Learning and Data Science Projects |  |
| Computational Fluid Dynamics and FEA | CFD and FEA Projects |  |
- Programming Languages: Python, Matlab & Simulink, C++, Git
- Frameworks: PyTorch, TensorFlow, OpenCV, Scikit-Learn
- Control systems: MPC, PID, LQR, MRAC, Self-Tunning, Fault detection, diagnosis & isolation
- Automation: PLC, SFC, Siemens Tia Portal
- Robotics: Perception, Navigation, Path planning
- Computer Vision: OpenCV, YOLO, Tracking, Segmentation, Vision transformers
- Sensor Fusion: EKF, IMM, Adaptive Filtering
- Machine Learning: Pytorch, huggingface, AI Agents, LLM, Streamlit, FastAPI
- Cloud & ops: Git, Microsoft Azure, Docker, Google colab, Vercel, VMware
- Tools: Solidworks, Ansys, Blender, Tableau, Siemens Tia Portal, HMI design
- Operating Systems: Windows, Linux.
Thank you for stopping by and checking out my GitHub profile. I'm always eager to collaborate and learn from fellow developers and enthusiasts. Let's build amazing things together! 😊