A high-performance Continuous-Time Gaussian Belief Propagation (CT-GBP) framework with fully automated symbolic factor generation and seamless Ceres interoperability targeting distributed SLAM operations!
Report Issues or Request Features
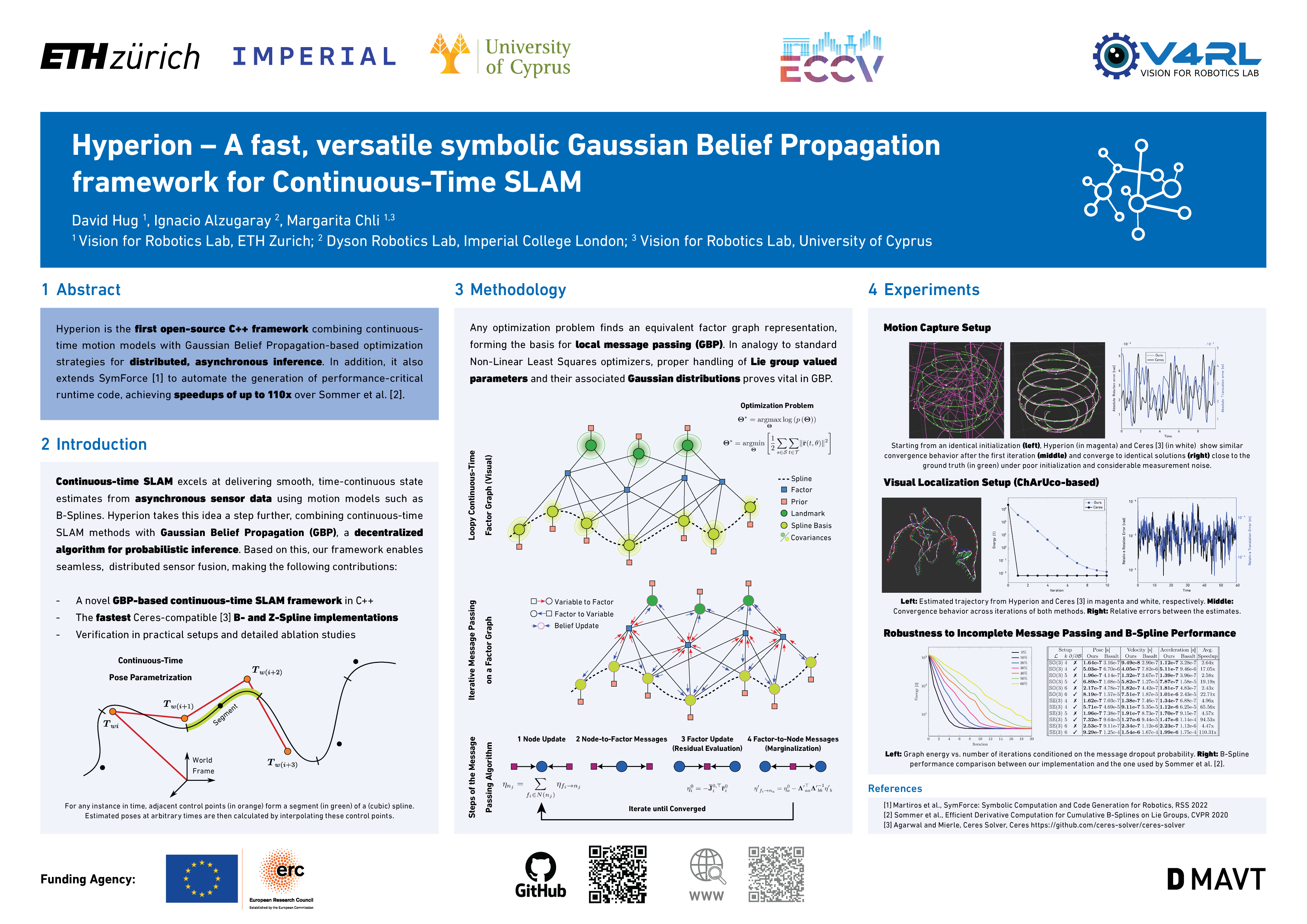
Hyperion is a novel, modular, distributed, high-performance optimization framework targeting both discrete- and
continuous-time SLAM (Simultaneous Localization and Mapping) applications. It stands out by offering the
first open-source C++ implementation of a Gaussian-Belief-Propagation-based Non-Linear Least Squares solver, which,
in turn, offers native support for decentralized, stochastic inference on factor graphs. In addition, Hyperion also
extends SymForce to automate the generation of high-performance
implementations for spline-related residuals from symbolic, high-level expressions. This results in the fastest,
Ceres-interoperable B- and Z-Spline implementations, achieving speedups of up to 110x over
previous state-of-the-art methods. Links to Paper,
Poster, and
Video.
{kind=link}
Hyperion was presented at the European Conference on Computer Vision 2024 (ECCV 2024). Until the final version of record becomes available, please cite its archived version as follows:
@inproceedings{Hug:etal:ECCV2024,
title={{Hyperion -- A fast, versatile symbolic Gaussian Belief Propagation framework for Continuous-Time SLAM}},
author={David Hug and Ignacio Alzugaray and Margarita Chli},
booktitle={Computer Vision -- ECCV 2024},
year={2024},
publisher={Springer Nature Switzerland},
address={Cham},
pages={215--231},
isbn={978-3-031-73404-5},
doi={10.1007/978-3-031-73404-5_13}
}
Additional documentation for installing and using Hyperion will be available soon. The framework comprises two main modules: a Python-based symbolic code generation module and an optimization module for performing inference on general factor graphs. Currently, three executables are provided: one for demonstrating how to set up a minimization problem in Hyperion, and two others for running tests and benchmarks. Hyperion's API closely mirrors that of Ceres, offering familiarity for users of that library. Additionally, a sample benchmark run is included for reference, detailing the metrics reported in the paper.
