work in progress...
Corridor Map project uses premake5 for builds. At the moment only Windows build is supported
To generate Visual Studio solution: premake5 vs2015 (vs2013 should work as well)
premake5 executable can be found in the root of this repository.
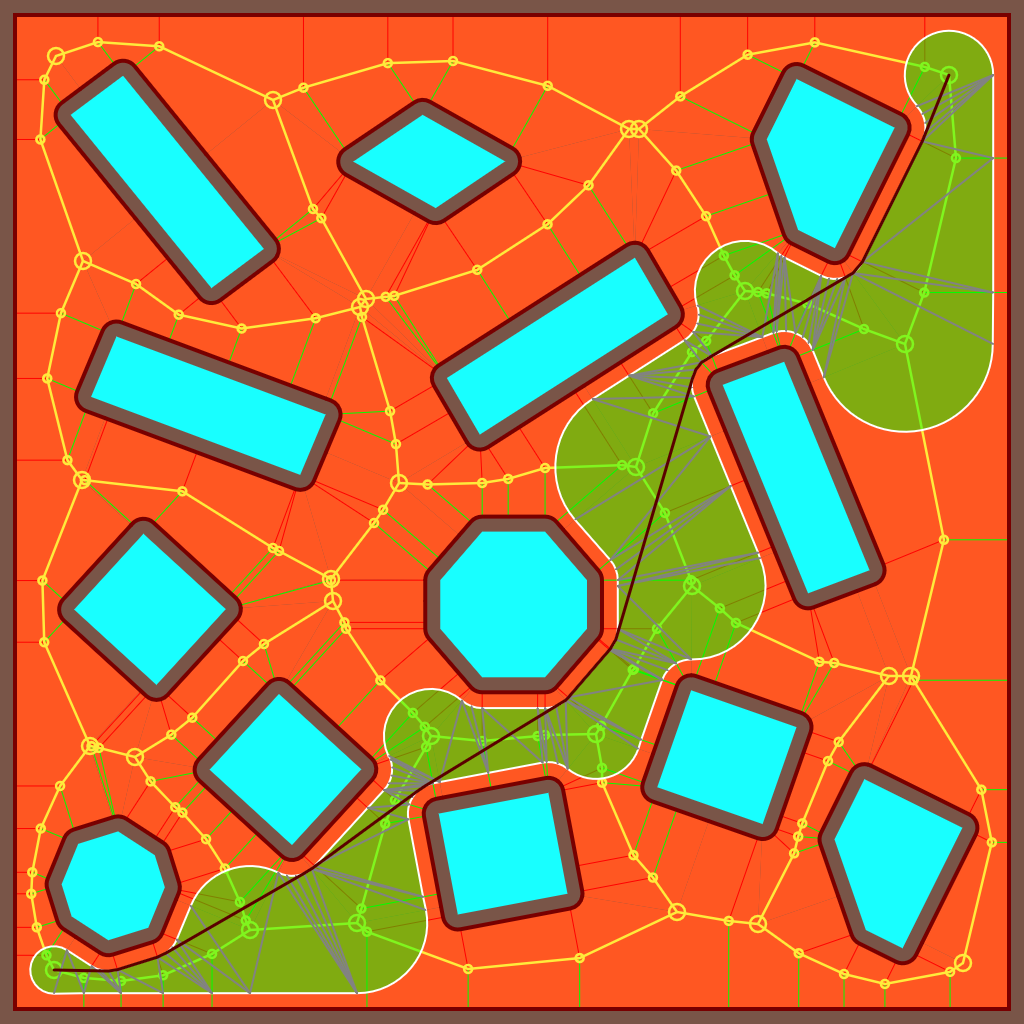
Voronoi diagram is rendered on GPU. OpenCL kernel detects edges and vertices of the medial axis:

CPU traces connections and assembles the final graph:

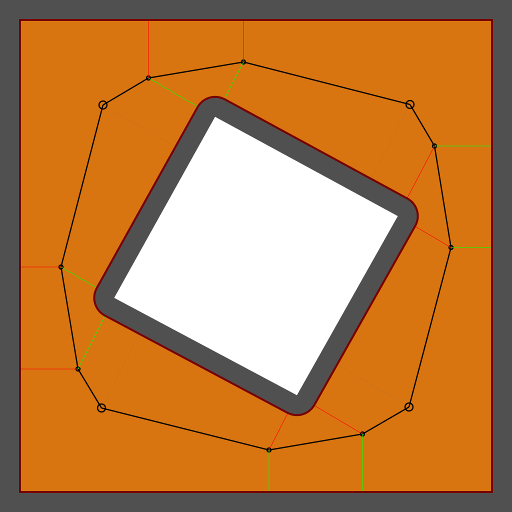
This graph can be used to extract corridor, represented as a set of disks:

Shortest path in the corridor, fast version for triangulated corridor:
Continuous shortest path (arcs & line segments), slower but doesn't require triangulation:

Another continuous path example:

Roland Geraerts. Planning Short Paths with Clearance using Explicit Corridors. In IEEE International Conference on Robotics and Automation, pp. 1997-2004, 2010. link