Code für die zwei Arduinos des Kamel Roboters. Die Kommunikation findet über den I²C-Bus statt.
Den aktuellen Code der Bildauswertung werden wir nach dem RoboCup 2020 veröffentlichen.
Älteren Code gibt es hier: https://github.com/carlobrok/PIv10
| Computer | I²C-Rolle | Aufgabe |
|---|---|---|
| Raspberry Pi 3B+ | master | Bildauswertung, Daten sammeln, Roboter steuern |
| Arduino | slave | Motoren steuern |
| Arduino | slave | Sensordaten sammeln |
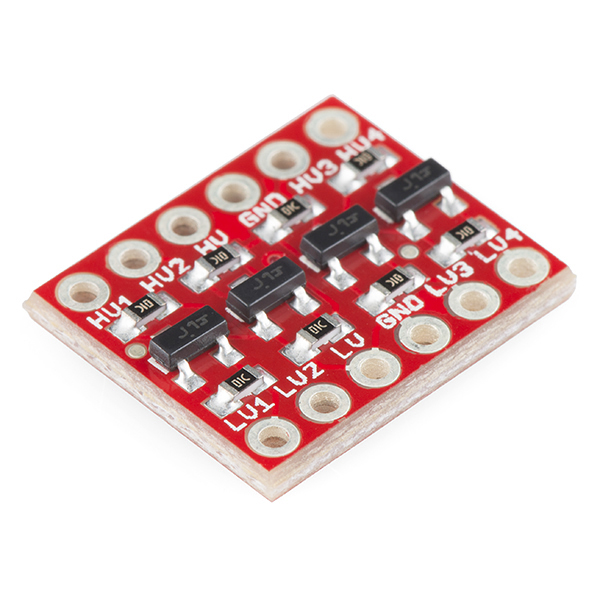
Zwischen dem Raspberry Pi und den Arduinos ist ein Levelshifter verbaut, da sonst der Raspberry Pi durchbrennt. Wir nutzen diesen Levelshifter: