System Overview
ExoMy is a 3D printed rover, designed as a low-cost robot platform for hobbyists, educators and researchers. All hardware and software is Open Source and was designed with ease-of-use and reliability in mind.
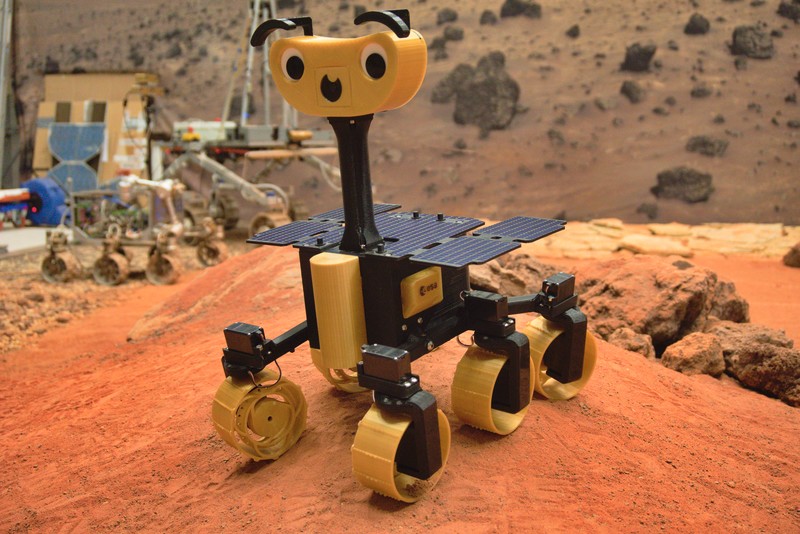

The rover design is inspired by the ExoMars rover Rosalind Franklin and mimics it's most characteristic features.

The appearance of ExoMy can easily be customised, making it an interactive robotic platform for kids and adults alike.

ExoMy features only off-the-shelve components, with a Raspberry Pi as it's brain. Six steerable wheels allow ExoMy to navigate through rough terrain. A camera allows remote controlling, or the implementation of vision based algorithms.

The cost of ExoMy can range from 250€ to 500€, depending on which components are already owned and which supplier is used.


Control ExoMy using a gamepad or a dedicated web interface running on a smartphone, laptop or tablet.


ExoMy is running ROS within a Ubuntu Docker running on the Raspberry Pi.





