Moritz Reuss1, Ömer Erdinç Yağmurlu, Fabian Wenzel, Rudolf Lioutikov1
1Intuitive Robots Lab, Karlsruhe Institute of Technology
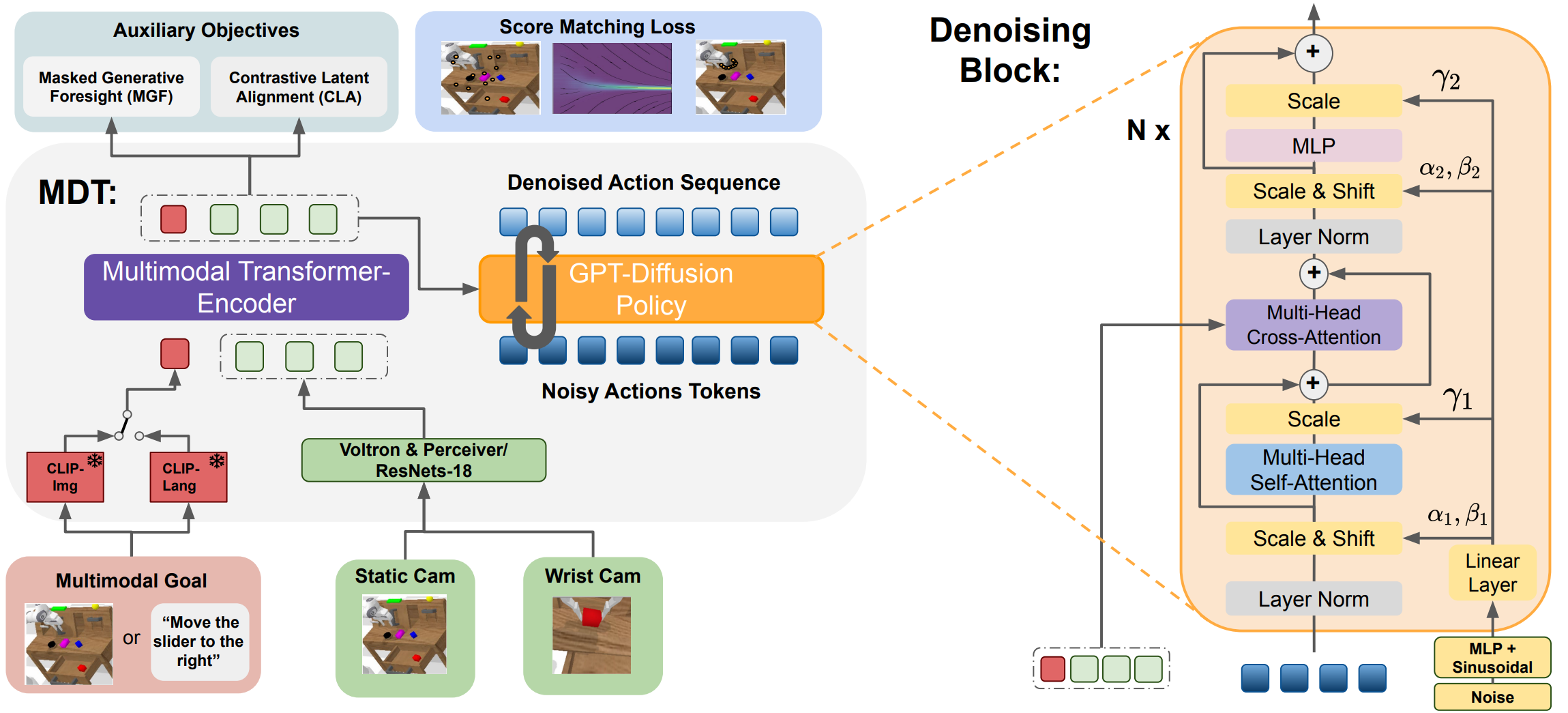
This is the official code repository for the paper Multimodal Diffusion Transformer: Learning Versatile Behavior from Multimodal Goals.
Pre-trained models are available here.
Results on the CALVIN benchmark (1000 chains):
| Train | Method | 1 | 2 | 3 | 4 | 5 | Avg. Len. |
|---|---|---|---|---|---|---|---|
| D | HULC | 82.5% | 66.8% | 52.0% | 39.3% | 27.5% | 2.68±(0.11) |
| LAD | 88.7% | 69.9% | 54.5% | 42.7% | 32.2% | 2.88±(0.19) | |
| Distill-D | 86.7% | 71.5% | 57.0% | 45.9% | 35.6% | 2.97±(0.04) | |
| MT-ACT | 88.4% | 72.2% | 57.2% | 44.9% | 35.3% | 2.98±(0.05) | |
| MDT (ours) | 93.3% | 82.4% | 71.5% | 60.9% | 51.1% | 3.59±(0.07) | |
| MDT-V (ours) | 93.9% | 83.8% | 73.5% | 63.9% | 54.9% | 3.70±(0.03)* | |
| ABCD | HULC | 88.9% | 73.3% | 58.7% | 47.5% | 38.3% | 3.06±(0.07) |
| Distill-D | 86.3% | 72.7% | 60.1% | 51.2% | 41.7% | 3.16±(0.06) | |
| MT-ACT | 87.1% | 69.8% | 53.4% | 40.0% | 29.3% | 2.80±(0.03) | |
| RoboFlamingo | 96.4% | 89.6% | 82.4% | 74.0% | 66.0% | 4.09±(0.00) | |
| MDT (ours) | 97.8% | 93.8% | 88.8% | 83.1% | 77.0% | 4.41±(0.03) | |
| MDT-V (ours) | 99.1% | 96.8% | 92.8% | 88.5% | 83.1% | 4.60±(0.05)* |
*: 3.72±(0.05) (D) and 4.52±(0.02) (ABCD) in the paper. Performance is higher than reported given some fixes in the camera-ready code version.
To begin, clone the repository locally:
git clone --recurse-submodules [email protected]:intuitive-robots/mdt_policy.git
export MDT_ROOT=$(pwd)/mdt_policy
Install the requirements: (Note we provided a changed verison of pyhash, given numerous problems when installing it manually)
cd $MDT_ROOT
conda create -n mdt_env python=3.8
conda activate mdt_env
cd calvin_env/tacto
pip install -e .
cd ..
pip install -e .
cd ..
pip install setuptools==57.5.0
cd pyhash-0.9.3
python setup.py build
python setup.py install
cd ..Next we can install the rest of the missing packages:
pip install -r requirements.txt
If you want to train on the CALVIN dataset, choose a split with:
cd $MDT_ROOT/dataset
sh download_data.sh D | ABCDSince MDT uses action chunking, it needs to load multiple (~10) episode_{}.npz files for each inference. In combination with batching, this results in a large disk bandwidth needed for each iteration (usually ~2000MB/iteration).
This has the potential of significantly reducing your GPU utilization rate during training depending on your hardware.
Therefore, you can use the script extract_by_key.py to extract the data into a single file, avoiding opening too many episode files when using the CALVIN dataset.
python preprocess/extract_by_key.py -i /YOUR/PATH/TO/CALVIN/ \
--in_task allRun this command to see more detailed information:
python preprocess/extract_by_key.py -hImportant params:
--in_root:/YOUR/PATH/TO/CALVIN/, e.g/data3/geyuan/datasets/CALVIN/--extract_key: A key ofdict(episode_xxx.npz), default is 'rel_actions', the saved file name depends on this (i.eep_{extract_key}.npy)
Optional params:
--in_task: default is 'all', meaning all task folders (e.gtask_ABCD_D/) of CALVIN--in_split: default is 'all', meaning bothtraining/andvalidation/--out_dir: optional, default is 'None', and will be converted to{in_root}/{in_task}/{in_split}/extracted/--force: whether to overwrite existing extracted data
Thanks to @ygtxr1997 for debugging the GPU utilization and providing a merge request.
| Name | Split | 1 | 2 | 3 | 4 | 5 | Avg. Len. | Model | Seed | eval: sigma-min |
|---|---|---|---|---|---|---|---|---|---|---|
| mdtv-1-abcd | ABCD -> D | 99.6% | 97.5% | 94.0% | 90.2% | 84.7% | 4.66 | MDT-V | 142 | 1.000 |
| mdtv-2-abcd | ABCD -> D | 99.0% | 96.2% | 92.4% | 88.3% | 82.5% | 4.58 | MDT-V | 242 | 1.000 |
| mdtv-3-abcd | ABCD -> D | 98.9% | 96.7% | 92.1% | 87.1% | 82.1% | 4.57 | MDT-V | 42 | 1.000 |
| mdtv-1-d | D -> D | 93.8% | 83.4% | 72.6% | 63.2% | 54.4% | 3.67 | MDT-V | 142 | 0.001 |
| mdtv-2-d | D -> D | 94.0% | 84.0% | 73.3% | 63.5% | 54.2% | 3.69 | MDT-V | 242 | 0.001 |
| mdtv-3-d | D -> D | 93.9% | 84.0% | 74.6% | 65.0% | 56.3% | 3.74 | MDT-V | 42 | 1.000 |
You can find all of the aforementioned models under here.
Adjust conf/mdt_evaluate.conf according to the model you downloaded. Important keys are:
voltron_cache: set a rw path in order to avoid downloading Voltron from huggingface each run.num_videos:nfirst rollouts of the model will be recorded as a gif.dataset_pathandtrain_folder: location of the downloaded files.sigma_min: use the values in the table for best results with a given model.
Then run:
python mdt/evaluation/mdt_evaluate.pyTo train the MDT model with the maximum amount of available GPUS, run:
python mdt/training.py
For replication of the originial training results I recommend to use 4 GPUs with a batch_size of 128 and train them for 30 (20) epochs for ABCD (D only). You can find the exact configuration used for each of our pretrained models in .hydra/config.yaml under the respective model's folder.
This work is only possible because of the code from the following open-source projects and datasets:
Original: https://github.com/mees/calvin License: MIT
Original: https://github.com/intuitive-robots/beso License: MIT
Original: https://github.com/siddk/voltron-robotics License: MIT
Original: https://github.com/openai/CLIP License: MIT
Original: https://github.com/lukashermann/hulc License: MIT
If you found the code usefull, please cite our work:
@inproceedings{
reuss2024multimodal,
title={Multimodal Diffusion Transformer: Learning Versatile Behavior from Multimodal Goals},
author={Moritz Reuss and {\"O}mer Erdin{\c{c}} Ya{\u{g}}murlu and Fabian Wenzel and Rudolf Lioutikov},
booktitle={Robotics: Science and Systems},
year={2024}
}