generated from Andre601/mkdocs-template
-
Notifications
You must be signed in to change notification settings - Fork 2
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
Showing
10 changed files
with
296 additions
and
9 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,27 +1,31 @@ | ||
| --- | ||
| hide: | ||
| - toc | ||
| --- | ||
|
|
||
| # Dataset overview | ||
|
|
||
| ## `JKK_DATASET_01` | ||
| This dataset consists of measurement log files (ROS 1 rosbag), pointcloud files and additional scripts to access and edit these. The data is provided for research and educational purposes. | ||
|
|
||
| [Details](jkk_dataset_01){ .md-button .md-button--primary } | ||
|
|
||
| { width="600" } | ||
|
|
||
|
|
||
|  | ||
|
|
||
| ## `JKK_DATASET_02` | ||
|
|
||
| This dataset consists of measurement log files (ROS 2 mcap) with additional scripts to access and edit these. The data is provided for research and educational purposes. | ||
|
|
||
| [Details](jkk_dataset_02){ .md-button .md-button--primary } | ||
|
|
||
|  | ||
| { width="600" } | ||
|
|
||
| ## `JKK_DATASET_03` | ||
|
|
||
| This dataset contains the Human-like Behavior (HLB) usecase data, in mat format. | ||
|
|
||
| [Details](jkk_dataset_03){ .md-button .md-button--primary } | ||
|
|
||
|  | ||
| { width="600" } | ||
|
|
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,7 +1,12 @@ | ||
| The log data is in .mcap format, the standard logging format for ROS 2. | ||
|
|
||
| The log data is in .mcap format, the standard logging format for [`ROS 2`](https://docs.ros.org/). | ||
|
|
||
| ## Python notebook | ||
|
|
||
| [Open MCAP in python notebook](https://github.com/jkk-research/jkk-research.github.io/blob/master/notebooks/mcap_basics.ipynb){ .md-button } | ||
|
|
||
| ## Some images | ||
|
|
||
|  | ||
|
|
||
|  |
{kind=link}
Loading
Sorry, something went wrong. Reload?
Sorry, we cannot display this file.
Sorry, this file is invalid so it cannot be displayed.
{kind=link}
Loading
Sorry, something went wrong. Reload?
Sorry, we cannot display this file.
Sorry, this file is invalid so it cannot be displayed.
{kind=link}
Loading
Sorry, something went wrong. Reload?
Sorry, we cannot display this file.
Sorry, this file is invalid so it cannot be displayed.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,230 @@ | ||
| # `ROS 1` real robot workshop | ||
|
|
||
| - A small overview of the `Bavarian-Hungarian Self-driving vehicles` workshop. | ||
| - **Date**: 2023.11.03. | ||
| - **Place**: Győr, Hungary. | ||
|
|
||
| ## The `megoldas_zala23` ROS 1 package | ||
|
|
||
| 🤖 In the following a very simple wall/gap following approach will be presented and described. The origin of he code is based on the work of Suresh Babu (University of Virginia, [license](https://github.com/linklab-uva/f1tenth_gtc_tutorial/blob/master/LICENSE)). Link to the original code: [github.com/linklab-uva/f1tenth_gtc_tutorial](https://github.com/linklab-uva/f1tenth_gtc_tutorial). | ||
|
|
||
| The name of the package is a comes from a hungarian expression (`megoldas`: solution / Lösung). | ||
|
|
||
| ## The robot used in the competition | ||
| Wheeltec / Roboworks Rosbot mini Ackermann robot | ||
|  | ||
|
|
||
| On-board computer | ||
| - Nvidia Jetson Nano | ||
|
|
||
| Sensors | ||
| - Orbbec Depth Camera | ||
| - LSN10 LIDAR | ||
|
|
||
|
|
||
| ## Video | ||
|
|
||
| <iframe width="560" height="315" src="https://www.youtube.com/embed/-PStmHQlJaU?si=eOFQazJ38qJyHe2u" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture; web-share" allowfullscreen></iframe> | ||
|
|
||
| ## Usage | ||
| Prerequisites: | ||
| - WiFi-enabled computer with Ubuntu 18.04 / 20.04 operating system and ROS Melodic / Noetic installation | ||
| - Internet access (Ethernet cable or WiFi) | ||
|
|
||
| 1. Turn on the robot platform. | ||
| 2. Use the computer to connect to the WiFi network created by the robot. The name of the WiFi network is unique for each robot platform, the `#` at the end of the SSID changes according to the number of the robot platform: | ||
| ``` | ||
| SSID: WHEELTEC_CAR_5.5_# | ||
| Password: dongguan | ||
| ``` | ||
| 3. Use SSH to connect to the on-board computer of the robot platform with the following terminal command: | ||
| ``` | ||
| ssh [email protected] | ||
| ``` | ||
| A password will be required, the default password is `dongguan` | ||
|
|
||
| ### Internet access on the robot platform | ||
|
|
||
| Software packages can be downloaded to the on-board computer of the robot platform, which requires internet access. | ||
|
|
||
| - Ethernet: connect the Ethernet cable to the Ethernet port of the on-board computer of the robot platform. | ||
| - WiFi: after issuing the `nmtui` terminal command, connect to the available WiFi network. | ||
| ``` | ||
| nmtui | ||
| ``` | ||
|
|
||
| <img src="https://user-images.githubusercontent.com/11504709/160778891-0c06e338-405f-43c6-8aac-928af33c057e.png" width="50%" /> | ||
|
|
||
|
|
||
| ### Install the `ROS 1` package | ||
|
|
||
| After installation, the functions of the robot platform can be accessed using ROS. The sample solution of the competition can also be deployed by ROS. | ||
|
|
||
| Create a workspace and install the sample solution on the robot: | ||
|
|
||
| ``` bash | ||
| mkdir -p ~/workshop_ws/src | ||
| ``` | ||
|
|
||
| ``` bash | ||
| cd ~/workshop_ws/ | ||
| ``` | ||
|
|
||
| ``` bash | ||
| catkin init | ||
| ``` | ||
|
|
||
| ``` bash | ||
| cd ~/workshop_ws/src/ | ||
| ``` | ||
|
|
||
| ``` bash | ||
| git clone https://github.com/robotverseny/megoldas_zala23 | ||
| ``` | ||
|
|
||
| ``` bash | ||
| cd ~/workshop_ws/ | ||
| ``` | ||
|
|
||
| ``` bash | ||
| catkin build megoldas_zala23 | ||
| ``` | ||
|
|
||
| ``` bash | ||
| echo "source /home/wheeltec/workshop_ws/devel/setup.bash" >> ~/.bashrc | ||
| ``` | ||
|
|
||
| ``` bash | ||
| source ~/.bashrc | ||
| ``` | ||
|
|
||
| Install `screen` | ||
| ``` bash | ||
| sudo apt install mc screen | ||
| ``` | ||
|
|
||
| Install jks visualization rviz plugin: depending on ROS 1 version (**melodic** / **noetic**): | ||
|
|
||
| ``` bash | ||
| sudo apt install ros-melodic-jsk-rviz-plugins | ||
| ``` | ||
|
|
||
| ``` bash | ||
| sudo apt install ros-noetic-jsk-rviz-plugins | ||
| ``` | ||
|
|
||
| ## Usage | ||
|
|
||
| ### Start solution using screen (recommended) | ||
|
|
||
| The script `verseny_start.sh` sets the required environmental variables, starts the ROS nodes and finally after *2 minutes* **stops** everything. Have a look at the code: [verseny_start.sh](https://raw.githubusercontent.com/robotverseny/megoldas_zala23/main/etc/verseny_start.sh) | ||
|
|
||
| ``` | ||
| rosrun megoldas_zala23 verseny_start.sh | ||
| ``` | ||
|
|
||
| The `verseny_start.sh` shell script usually launches several virtual terminals, such as: `roscore`, `turn_on_wheeltec_robot`, `lsn10_lidar`, `megoldas1.launch`. All components of the solution can be stopped with the following command: | ||
| ``` | ||
| rosrun megoldas_zala23 stop_all.sh | ||
| ``` | ||
|
|
||
| Further commands: | ||
|
|
||
| - list screen: `screen -ls` | ||
| - restore screen: `screen -r roscore` / `screen -r turn_on_wheeltec_robot` / `screen -r megoldas1` | ||
| - detach: `Ctrl-a` + `Ctrl-d` | ||
|
|
||
| ## ROS connection | ||
|
|
||
| The ROS topics advertised by the robot platform are also available on the computer connected to the platform, with the appropriate setting of the `ROS_MASTER_URI` variable: | ||
| ``` r | ||
| export ROS_MASTER_URI=http://192.168.0.100:11311 | ||
| ``` | ||
| After the appropriate setting of the variable, the topics can be listed and visualized using Rviz: | ||
| ``` | ||
| rostopic list | ||
| ``` | ||
| ``` | ||
| rosrun rviz rviz | ||
| ``` | ||
| ## Some explanatory animations | ||
| ``` | ||
| roslaunch megoldas_zala23 rviz1.launch | ||
| ``` | ||
|
|
||
|  | ||
|  | ||
|  | ||
|
|
||
| ### Start solution per component | ||
|
|
||
| The solution can also be started per component, not just as a single shell script. This requires four terminal windows on the on-board computer of the robot platform and issuing the following commands per terminal: | ||
|
|
||
| ``` bash | ||
| roscore | ||
| ``` | ||
|
|
||
| ``` bash | ||
| roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch | ||
| ``` | ||
|
|
||
| ``` bash | ||
| roslaunch lsn10 lsn10.launch | ||
| ``` | ||
|
|
||
| ``` bash | ||
| roslaunch megoldas_zala23 megoldas1.launch | ||
| ``` | ||
|
|
||
| ## Additional information | ||
|
|
||
| ### Workspaces | ||
| ``` | ||
| ~/wheeltec_robot/src | ||
| ~/catkin_workspace/src | ||
| ~/workshop_ws/src/ | ||
| ``` | ||
|
|
||
|
|
||
|
|
||
| ## Topic management | ||
|
|
||
| ``` | ||
| rostopic hz /scan | ||
| rostopic echo /scan -n1 | ||
| rostopic type /scan | ||
| ``` | ||
|
|
||
| ``` | ||
| sensor_msgs/LaserScan | ||
| ``` | ||
|
|
||
| ## Robot platform language settings | ||
| ``` | ||
| sudo dpkg-reconfigure locales | ||
| ``` | ||
|
|
||
| 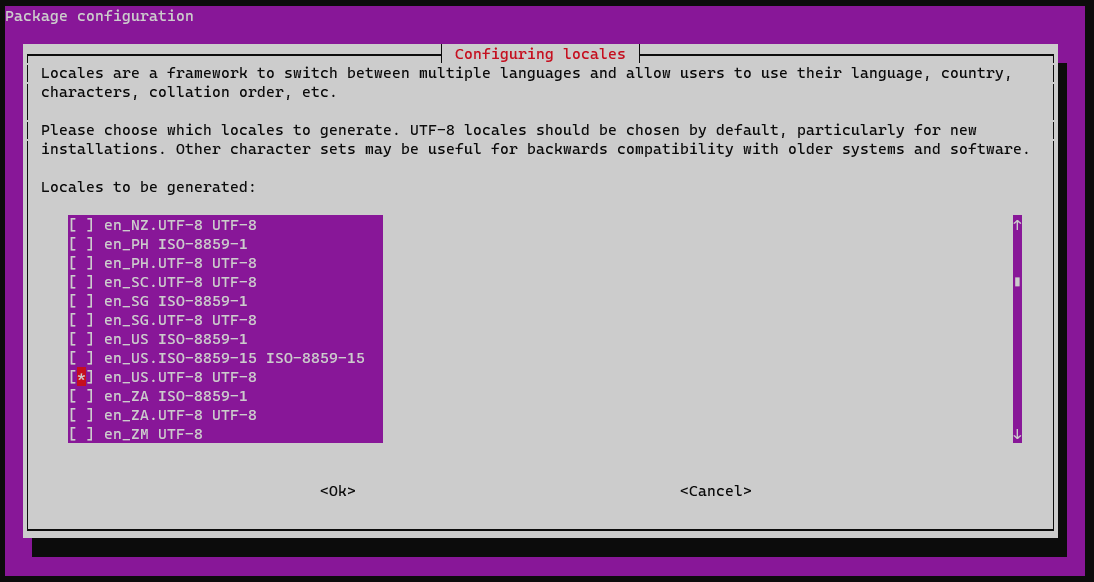 | ||
|
|
||
| **reboot** | ||
|
|
||
| ## Rosbag management | ||
| ``` | ||
| cd ~/rosbags | ||
| rosbag record -a -o test1 | ||
| ``` | ||
| ``` | ||
| rsync -avzh --progress [email protected]:/home/wheeltec/rosbags/ /mnt/c/bag/wheeltec/ | ||
| rosbag info test1_2023-03-30-12-37-22.bag | ||
| rosbag play test1_2023-03-30-12-37-22.bag | ||
| ``` | ||
|
|
||
| You can even visualize rosbags in [Foxglove studio](https://foxglove.dev/): | ||
|
|
||
|  | ||
|
|
||
| [Download rosbags](https://drive.google.com/drive/folders/1CAh-EIHjlvURHi62bxNnC9pIxUP5A00K?usp=drive_link) | ||
|
|
||
| - [Further explanation ipynotebook](https://github.com/robotverseny/megoldas_zala23/blob/main/etc/explain.ipynb) | ||
| - [Competition homepage](https://robotverseny.github.io/) | ||
| - [Foxglove studio](https://foxglove.dev/) |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,13 @@ | ||
| # `ROS 2` F1/10 simulation workshop | ||
|
|
||
| - A small overview of the `Bavarian-Hungarian Self-driving vehicles` workshop. | ||
| - **Date**: 2024.04.18. | ||
| - **Place**: Kempten, Germany. | ||
|
|
||
|
|
||
| ## A `ROS 2` package | ||
|
|
||
| [](https://docs.ros.org/en/humble/) | ||
|
|
||
| ## Simulation | ||
| `ROS 2` humble |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,23 @@ | ||
| --- | ||
| hide: | ||
| - toc | ||
| --- | ||
|
|
||
|
|
||
| # Workshops overview | ||
|
|
||
| ## `2023.11.03` Győr `ROS 1` | ||
|
|
||
| During the workshop a very simple wall following approach was presented with hands-on experinece on a real robot. | ||
|
|
||
| { width="300" } | ||
| { width="300" } | ||
|
|
||
| [Go to details](2023_11/){ .md-button } | ||
|
|
||
| ## `2024.04.18` Kempten `ROS 2` | ||
| During the workshop F1/10 based simulation was presented based on `ROS 2` Humble. | ||
|
|
||
| { width="300" } | ||
|
|
||
| [Go to details](2024_04/){ .md-button } |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters