SchedulerSpecification
- The scheduler always creates a "job directory", results/<job tag>
- For asynchronous jobs, the scheduler creates a results/<job tag>/<hostname> directory for each host and runs one instance of autoserv for each host with these per-host directories as results directories.
- For synchronous jobs, the scheduler creates a results/<job tag>/groupN directory for each group of hosts formed, as defined by the job's sync_count. N is a numeric index starting at zero. The scheduler runs an instance of autoserv for each group of machines with these per-group directories as results directories.
Metahosts always get queue.log.<id> files created in the job directory (results/<job tag>). These logs contain a single line for each time a metahost is assigned a new host or cleared of its host. Each line includes a timestamp.
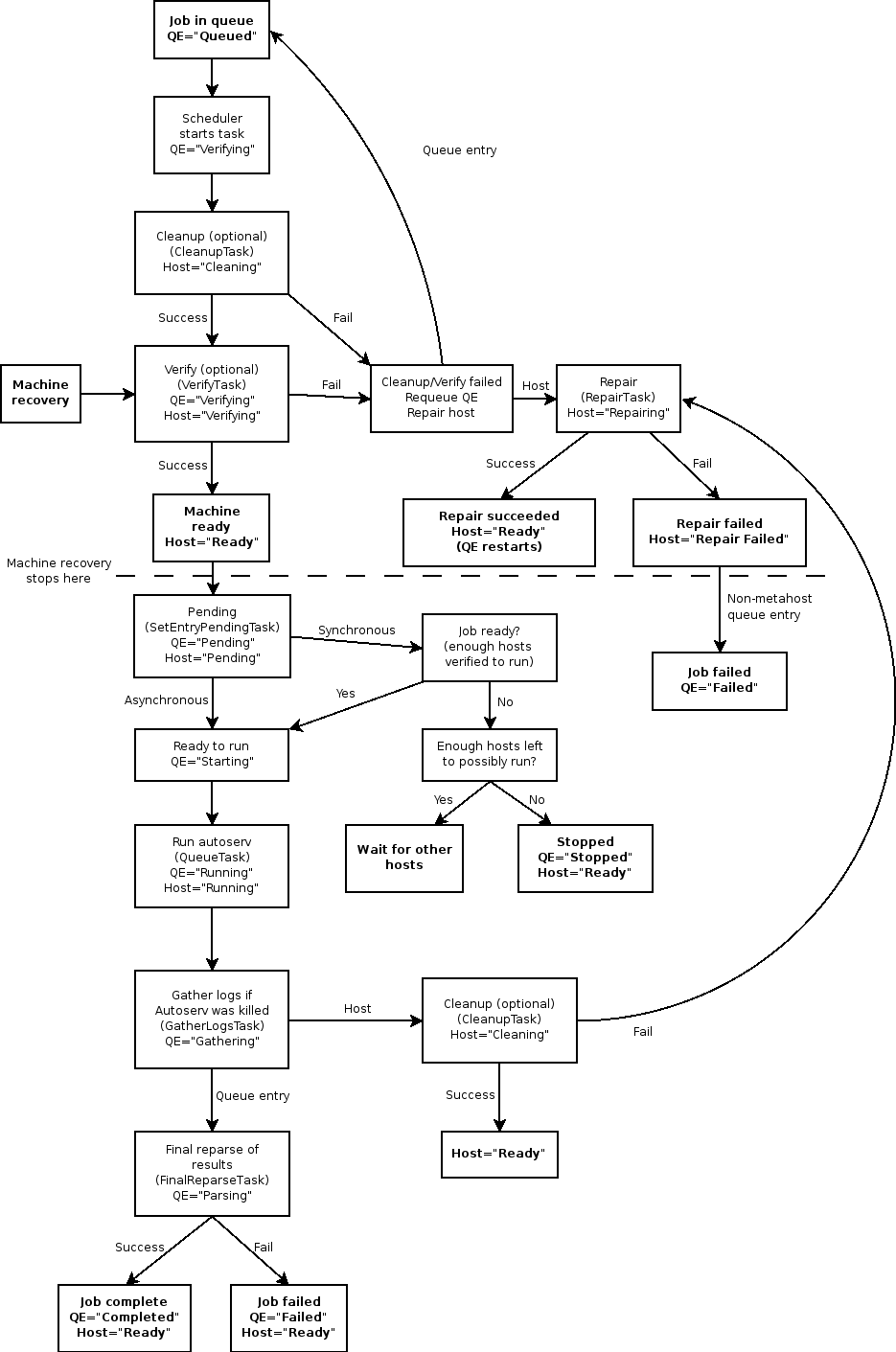
Verify/repair/cleanup information is handled like so:
-
During execution of verify/repair/cleanup, Autoserv output is directed to a temporary file under the results/drone_tmp directory.
-
When Autoserv completes, this file is copied to the host logs directory under results/hosts/<hostname>.
-
If the task fails and causes job failure, the log is also copied to the execution results directory (results/<job tag>/<hostname or groupN>). This happens if:
- The task was a pre-job cleanup or verify
- The task failed
- The correspond queue entry was scheduled for a particular host, not a metahost (for metahosts, the queue entry would simply choose a new host, so it wouldn't make sense to include the verify failure as part of the job).
If the subsequent repair succeeds, the log file is removed and the job is restarted.
The scheduler only creates a .machines file for asynchronous multi-machine jobs. It creates this file on the fly by appending each hostname to this file immediately before running the main autoserv process on that host. For synchronous jobs, autoserv creates the .machines file itself.
In order to support distributed setups (see DistributedServerSetup), the scheduler performs much of its work through the drone_manager module. A "drone" is a machine on which Autoserv is executed, which is not necessarily the machine on which the server is running. Here is a guide to this implementation:
- Overview
- All OS-dependent calls in the scheduler have been extracted into an interface on the drone_manager.DroneManager? class. This includes filesystem access and process execution, killing and monitoring.
- DroneManager? methods queue up actions to perform on drones.
- The scheduler calls DroneManager?.refresh() at the beginning of each tick, which connects to each drone and gathers information on running processes.
- The scheduler calls DroneManager?.execute_actions() at the end of each tick, which connects to each drone and executes all queued actions.
- DroneUtility?
- The drone_utility.DroneUtility? class contains implementations of all the OS-dependent actions.
- The drone_utility.MethodCall? class abstracts a call to a method on DroneUtility?.
- DroneUtility?.execute_calls() accepts a list of MethodCall? objects and returns a list of results, along with any warnings that were generated.
- The drone_utility module is executable as a script. It accepts a filename on the command line and reads a list of MethodCall? objects from that file in pickled format. This implements a simple batched RPC mechanism for DroneUtility?.
- Drone objects
- The drones module provides implementations of the
drones._AbstractDrone interface. AbstractDrone? allows the client
to queue up method calls to a DroneUtility? instance and execute
them on the drone machine. There are two implementations:
- a _LocalDrone class which simply imports drone_utility and calls methods directly, and
- a _RemoteDrone class which executes drone_utility on a remote host using the server.hosts.ssh_host.SSHHost class. It pickles the call list into a file, sends the file to the remote host, and executes drone_utility remotely on that file.
- The drones.get_drone(hostname) factory method is used to retrieve a drone object.
- The drones module provides implementations of the
drones._AbstractDrone interface. AbstractDrone? allows the client
to queue up method calls to a DroneUtility? instance and execute
them on the drone machine. There are two implementations:
- DroneManager?
- DroneManager? maintains a list of drone objects, one for each drone as well as one for the results repository host. Methods on DroneManager? are implemented by queuing up method calls on the appropriate drone objects. DroneManager?.execute_actions() then executes all queued calls for each drone in turn.
- DroneManager? also contains limited handling for dead drones.