A ROS-based open-source software for fusing mobile sensor data and visualizing SmartPhone Orientation
- Python
- ROS melodic
- Ubuntu 18.04 LTS
- Gazebo 9 simulator
- Connect your phone and computer to the same network (Hotspot can be used)
- Enter <ip address>:5000 to the URL field in PhonePi app
- ip addess could be find using
ifconfigcommand on linux terminal andipconfigon windows cmd prompt.
$ roscore
$ rosrun sensor_fusion_pkg sensor_streamer.py
$ rosrun sensor_fusion_pkg test_node_for_accel_mag.py
$ roslaunch phone_description phone_spawn.launch
$ roslaunch phone_description phone_rviz.launch
$ roscore
$ rosrun sensor_fusion_pkg sensor_streamer.py
$ rosrun sensor_fusion_pkg gyro_only_orientation.py
$ roslaunch phone_description phone_spawn.launch
$ roslaunch phone_description phone_rviz.launch
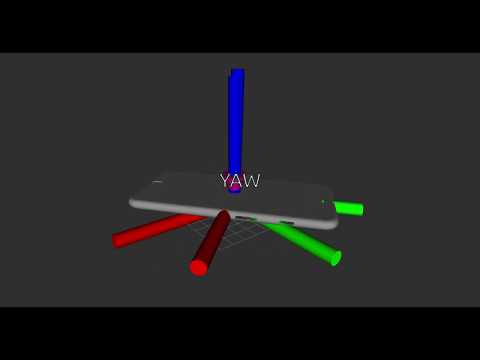
Visualize Phone Orientation (Fused orientation from Gyro, Accelerometer and Magnetometer using Complementary Filter)
$ roscore
$ rosrun sensor_fusion_pkg sensor_streamer.py
$ rosrun sensor_fusion_pkg complimentary_filter.py
$ roslaunch phone_description phone_spawn.launch
$ roslaunch phone_description phone_rviz.launch









Visualize Phone Orientation (Fused orientation from Gyro, Accelerometer and Magnetometer using Kalman Filter)
$ roscore
$ rosrun sensor_fusion_pkg sensor_streamer.py
$ rosrun sensor_fusion_pkg kalman_filter.py
$ roslaunch phone_description phone_spawn.launch
$ roslaunch phone_description phone_rviz.launch






Comparison between fused and gyro only estimates (RPYCF - complementary filter, RPYG - gyro only, RPYKF - kalman filter)



$ roscore
$ rosrun sensor_fusion_pkg sensor_streamer.py
$ rosrun sensor_fusion_pkg ground_truth_comparison.py
$ rosrun sensor_fusion_pkg kalman_filter.py
$ rosrun sensor_fusion_pkg complimentary_filter.py
$ rosrun sensor_fusion_pkg gyro_only_orientation.py
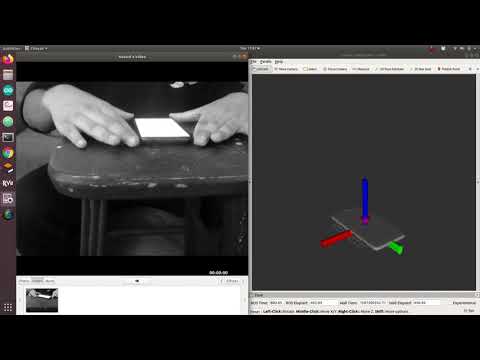
Note : The phone needs to be aligned with the angular benchmark in such a way that 0 degree yaw corresponds with 0 degrees. Successive positioning of the phones heading on the benchmark is carried out.


$ roscore
$ download bagfiles from google drive (square_traj_01.bag and rot_180_01.bag) and place in random folder
$ open new terminal and type "rqt_bag" and navigate to one of the bagfiles
$ right click on the topics "Accel_topic_stamped", "Gyro_topic_stamped", "Magno_topic_stamped" and "ee_rotation_stamped" and click "publish" to publish these topics
$ "rosrun sensor_fusion_pkg kalman_filter_robot.py" in separate terminal
$ Click the play button to publish topics. You should see text being printed in executable terminal
$ Stop publishing at any time and press ctrl+c in terminal. Plot will be generated

The graphic above is output by following the above procedure. The red line is the ground truth orientation data collected form the robotic manipulator using forward kinematics. The blue line is the kalman filter's estimate of the phone orientation during execution of the trajectory.