A specialisation of AG Common that describes a colony of ants and its main components (Ants and Nests) and the environment (Chemical communication and food sources) necessary to simulate the behaviour of an ant colony.
With this implementation is possible to describe different species of ants varying their behavior based on their tasks, within each specie the framework provides ways to specifies different communication stimulus for different castes as well as different ways to react to these stimuli.
This is work is part of my final MSc project that can be downloaded here, in the MSc report I studied how varying some parameters of the pheromone deposited by working ants affected how much food the colony as a whole was able to collect.
Actually this is an 180 second introduction because that is how long we are going to run the following simulation:
- Create an environment that has the dimension 500 x 500 and a simulation instance to handle the simulation itself.
- Create an Ant nest at the center of the environment, this nest will create an maximum of 100 ants.
- Add 8 food sources around the environment (they are rendered in green in the resulting images).
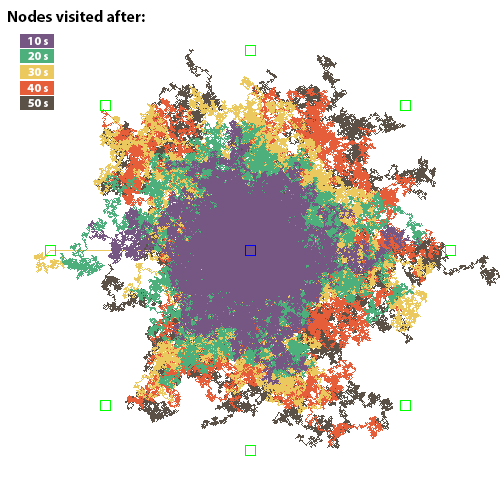
- Schedule some renders to create visual snapshots of the environment to help us visualise what nodes have been visited by the ants and where they have deposited pheromone.
public class RoundFoodSources {
public static void main(String[] args) {
// 1
final AntEnvironment env = new AntEnvironment(new Dimension(500, 500));
final AntSimulation sim = new AntSimulation("target/", env);
final Color envColour = new Color(255, 255, 255, 0);
// 2
env.createNestAt("nest", env.getHeight() / 2 - 5, env.getWidth() / 2 - 5,
new Dimension(10, 10), 100, Color.BLUE);
// 3
env.addFoodSourceAt("fs-01", 100, 100, new Dimension(10, 10), Color.GREEN, 30.0);
env.addFoodSourceAt("fs-02", 45, 245, new Dimension(10, 10), Color.GREEN, 30.0);
env.addFoodSourceAt("fs-03", 100, 400, new Dimension(10, 10), Color.GREEN, 30.0);
env.addFoodSourceAt("fs-04", 245, 445, new Dimension(10, 10), Color.GREEN, 30.0);
env.addFoodSourceAt("fs-05", 400, 400, new Dimension(10, 10), Color.GREEN, 30.0);
env.addFoodSourceAt("fs-06", 445, 245, new Dimension(10, 10), Color.GREEN, 30.0);
env.addFoodSourceAt("fs-07", 400, 100, new Dimension(10, 10), Color.GREEN, 30.0);
env.addFoodSourceAt("fs-08", 245, 45, new Dimension(10, 10), Color.GREEN, 30.0);
// 4
sim.scheduleEnvironmentElementRenderer("round-env.png", 0, TimeUnit.SECONDS);
sim.scheduleEnvironmentExploredRenderer("round-exp-10s.png", envColour,
new Color(118, 87, 131), 10, TimeUnit.SECONDS);
sim.scheduleEnvironmentExploredRenderer("round-exp-20s.png", envColour,
new Color(77, 175, 124), 20, TimeUnit.SECONDS);
sim.scheduleEnvironmentExploredRenderer("round-exp-30s.png", envColour,
new Color(235, 201, 94), 30, TimeUnit.SECONDS);
sim.scheduleEnvironmentExploredRenderer("round-exp-40s.png", envColour,
new Color(230, 93, 57), 40, TimeUnit.SECONDS);
sim.scheduleEnvironmentExploredRenderer("round-exp-50s.png", envColour,
new Color(91, 81, 71), 50, TimeUnit.SECONDS);
sim.scheduleChemicalStimulusRenderer(ForageStimulusType.TYPE,
"round-pheromone-50s.png", 50, TimeUnit.SECONDS);
sim.scheduleChemicalStimulusRenderer(ForageStimulusType.TYPE,
"round-pheromone-100s.png", 100, TimeUnit.SECONDS);
sim.scheduleChemicalStimulusRenderer(ForageStimulusType.TYPE,
"round-pheromone-180s.png", 180, TimeUnit.SECONDS);
sim.composeImage("round-exp-final.png", new String[]{
"round-exp-50s.png",
"round-exp-40s.png",
"round-exp-30s.png",
"round-exp-20s.png",
"round-exp-10s.png",
"round-env.png"});
sim.run(180, TimeUnit.SECONDS);
}
}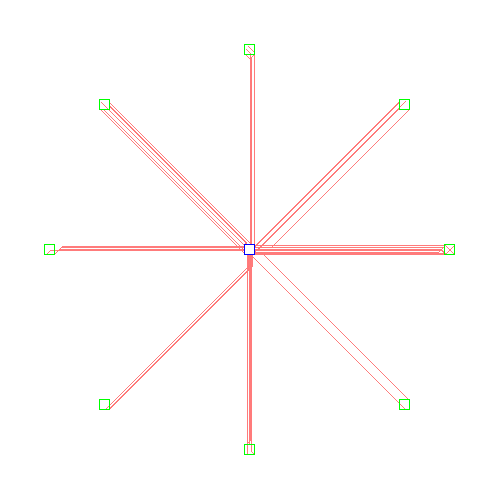
The agents used in this simulations use path integration as the algorithm to calculate how to get back to their nest. That is why the pheromone paths are always a straight line from the ant's current position to their nest. The illustration above shows how the use of pheromone as a way to communicate is reinforced by the feedback (deposit of more pheromone over time) given by the ants as a response on the environment around them.
This is a clear example of emergence, the agents are not aware of the other agents, but their contribution together with the other agents' created a trail of pheromone that is used by the entire colony as the optimal path to the food source.
The following is a very brief summary of the experiments and observations results described in the MSc project. I thought it would be useful to have it here because they offer a different insight into the framework details and show how it can actually be used.
For the full story on this experiments please refer to the MSc project report
This experiment investigates how different initial pheromone concentrations in the environment and the amount of pheromone each agent is capable of depositing in each interaction affect the agents navigation through the space.
Because the way the node selection was implemented, if we started with an environment with no pheromone at all and then an ant deposited any some in any node, the probability of this node being selected for the agent's next move was 100%, so it would effectively get stuck in a very small area (this is explained in more detail from page 50 in the report).
So what if we initialised the environment with just enough pheromone so that the agents could freely move and execute their tasks? But the question now is how much this initial concentration should be an how big should be the agents increment to the pheromone concentration so that the colony does not converges to a small area and at the same time it will not get too dispersed, so that its agents would not be able to communicate indirectly to each other and the colony behaviour would not emerge.
In this experiment two samples of the environment were taken, one close to the nest and one far from it.
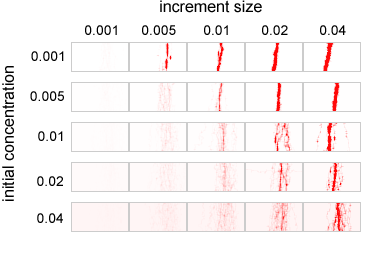
The trails left by the colonies can be compared in relation on how strong they are, how the agents are able to ’scape’ them to explore the environment and how it shaped when agents get further from the nest.
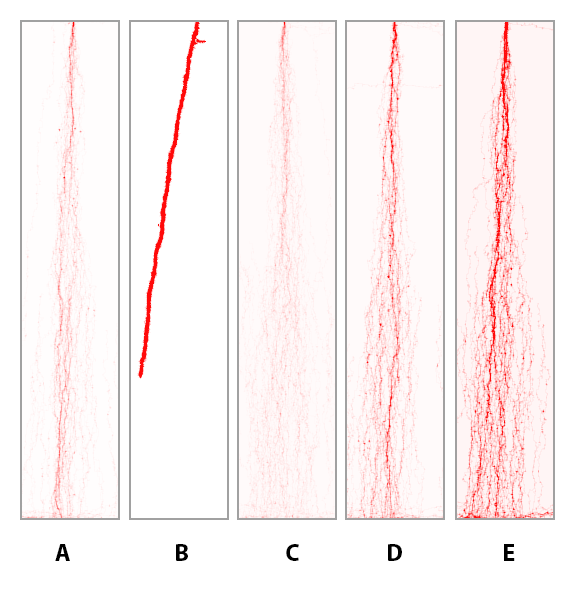
It is possible to observe from the figures that two very contrasting behaviours emerge, firstly because the environment has so little pheromone and the update is so small, they weight assigned to each of the neighbour nodes count considerably more than the pheromone deposited by the agents, so the agents end up very dispersed, thus no chemical trail is formed at all.
When the amount of pheromone deposited by the agents is increased the behaviour of the colony could not be more different than what was seen previously. The agents switch from exploring a large area to be ’trapped’ into the pheromone trail. This impedes the agents of exploring the space, what is not desirable for any colony.
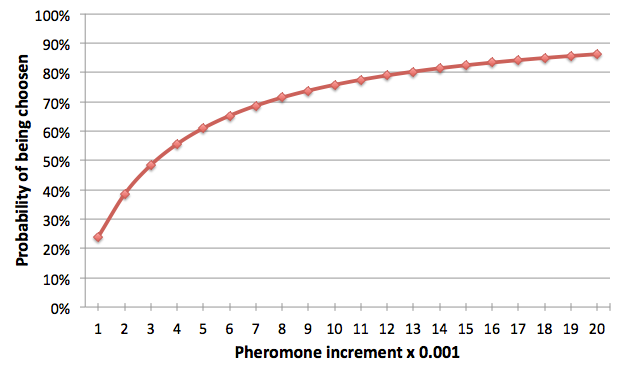
Further investigation revealed that the probability of selection increases in a logarithmic fashion. The following figure shows how the increase in probability progress when the amount of pheromone deposited by the agents increases by multiples of the initial concentration in the environment.
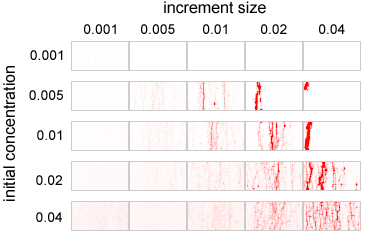
The complete trail pheromone trails left by simulation using 0.001,0.04 (a), 0.01,0.01 (b), 0.02,0.01 (c), 0.02,0.02 (d) and 0.4,04 (e) for initial pheromone concentration and update step respectively:
In this experiment the radius of action of the forage pheromone is varied in order to check the effects on the amount of food the colony is capable of forage.
At first, one would expect that the increase on the radius of the forage pheromone would have a positive impact on the colony capacity of collecting food as trails that lead to food sources are reinforced by agents carrying food back to the nest and with a wider spread of the pheromone more workers would fall in these trails.
However the data from the simulations show a different picture. The colony collect less and less food as the stimulus’ radius increase.
| Radius | Mean of food collected | Standard deviation |
|---|---|---|
| 0 | 6.0 | 1.21 |
| 1 | 4.9 | 0.72 |
| 2 | 3.3 | 0.53 |
The experiment was run 100 times for every radius. The following figure shows the samples distribution when variating the pheromone radius - 0 (a), 1 (b) and 2 (c) - and the samples’ probability density distribution (d)
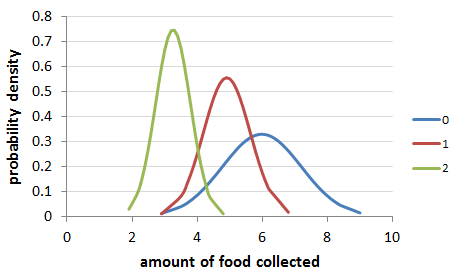
The figure above helps us to visualise what the previous table had already shown - the samples variance decreases when the radius increases.
The reason for this phenomena is that the bigger the pheromone radius, fewer agents are likely to ’escape’ from the trail, thus they are not able to explore different areas of the environment. This means that the agents will create virtually the same pheromone trail in each case to forage, so that their outcomes are likely to be very close.
With a more diversified exploratory reach, agents in the simulations using radius 0 are likely to have different degrees of success in finding food and taking it back to the nest in each simulation run, justifying the greater variance in the colony outcome. In other words, random events play a large role in determining the outcome.
Like AG Common, this ant specialisation can be divided in three main areas.
A specialisation of BasicNode
used to create environments for ant simulations. Pheromone nodes have a list of chemical
stimulus that are present in the node.
See: PheromoneNode,
AntEnvironmentFactory,
ChemicalCommStimulus,
ChemicalCommStimulusType
A NestNode is part of a
ant nest. It is extends the BasicNode adding a propriety that represents the amount
of food that particular node is capable of storing. NestNodes are assembled to
form ant nests.
A FoodSourceNode object
represents a node that contain some food. The amount of food is set at creation
time and ants that enter that node are able to collect food from it.
See: FoodSourceNode,
FoodSource
An abstraction of communication stimulus that represent chemical substances.
Represent chemical interactions between agents and the environment. Interaction might not be the right word for it, but objects of this class are interactions that some agents have with the environment and are possibly used by other agents to acquire information.
See: ChemicalCommStimulus,
ForageStimulusType,
WarningStimulusType
The Ant interface defines the basic
API for all ant agents. Moving direction, food collection and communication stimulus
deposit are all handled by all ants and defined in this interface.
See: Ant,
AntAgent,
WorkerAntAgent,
AntAgentFactory
Ants are implemented having limited memory size and limited capability of collecting food. Different types of ants have different memory sizes and can collect different amounts of food. Also the different types of ant interact differently with the environment so each type of ants define a list of chemical stimulus and how much of each of them the agent is able to lay in every interaction.
See: AntType,
WorkerAntType
The ForageTask implements a node selection
model to direct the ant towards a food source using pheromone trails. This model takes in
consideration the intensity of forage pheromone present in the 8 neighbour nodes around the agent.
See: ForageTask
The FindHomeNestTask implements the
path-integration algorithm to take the ant back to the nest were it was created.
See: FindHomeNestTask