System Structure
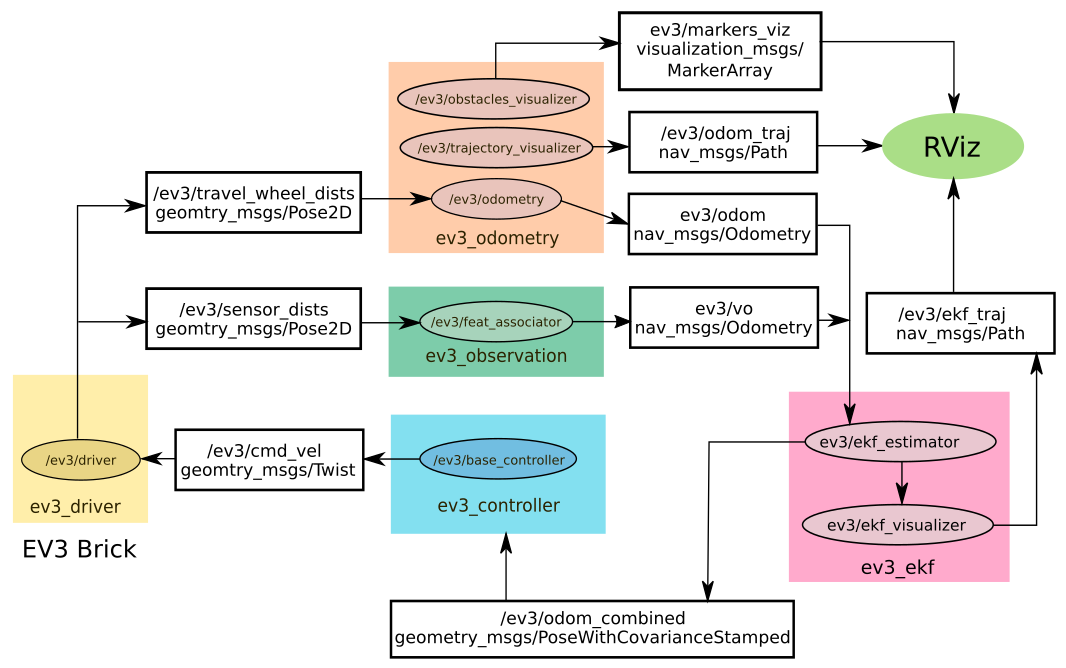
Following image gives a broad vision of system, where:
- Black and white rectangles are ROS topics;
- Colored rectangles are ROS packages;
- Colored ellipses are ROS nodes;
- Arrows indicate publish/subscribe data flows.
Here we see the 2D Pose scheme, including x position, y position and theta angle wrt. z axis.
- Robot (in blue) should follow the square of side L.
- Reference point is assumed to be the center of square.
- There are 4 walls (in brown) used as features in observation step of Kalman Filter.
- The distance from each center of wall plane to the origin is l.
- The distance in the perpendicular axis from wall center to origin is d.
