Python image processing script based on OpenCV to enable the control of a Line Follower robot through a camera.
To run the project you will need Python 2.7, Numpy and OpenCV 3 for python.
Download the python scripts and the simulator based on your platform.
Change the IP and PORT of the server and run the Main.py file.
Finally run the simulator executable and bind to the server adress.
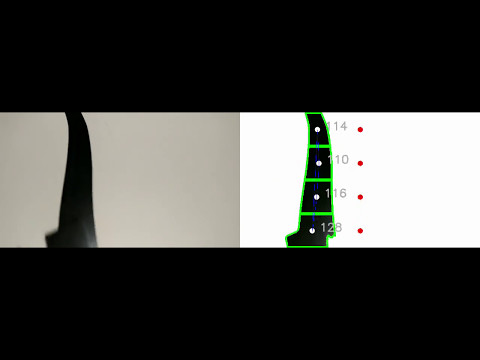
The main algorithm to calculate the direction and intensity of the turn is located in 'Image.py' file. And the main result of the turn value is sent by the 'direction' variable.
Unity version for the simulator: 5.5.1
Demo Video: