Simulation (Deprecated)
For simulation needs, please try the following two options:
=======================
Table of Contents generated with DocToc
- intuitive_research_kit_ros Documentation (deprecated)
- to ros workspace
- clone repository
- add to ros workspace
- resource
- build irk_kinematics
- build irk_teleop
- One MTM + PSM teleoperation
Please refer to https://github.com/jhu-dvrk/dvrk-ros
A ROS based simulation stack has been developed to give Robot visualization and simulation.
This package depends on CISST (cisstRobot) and sawROS, please check [wiki:sawROSTutorial sawROSTutorial] for build instructions.
- Clone the repository into a directory under ROS_PACKAGE_PATH (alternatively you can use ROS workspace). The code is under https://git.lcsr.jhu.edu/dvrk/intuitive_research_kit_ros
# to ros workspace
roscd
# clone repository
git clone [email protected]:dvrk/intuitive_research_kit_ros.git
# add to ros workspace
rosws set intuitive_research_kit_ros
# resource
source setup.sh- Change to branch ''dev_groovy''
git checkout dev_groovy- Build packages
# build irk_kinematics
rosmake irk_kinematics
# build irk_teleop
rosmake irk_teleopNOTE: You might need to setup CISST path during build process in CMake.
- Run visualization
# One MTM
roslaunch irk_model mtm_right_rviz.launch
# One PSM
roslaunch irk_model psm_rviz.launch
# One MTM + One PSM - Run tele-operation example
# One MTM + PSM teleoperation
roslaunch irk_teleop test_teleop.launch - Screenshot

-
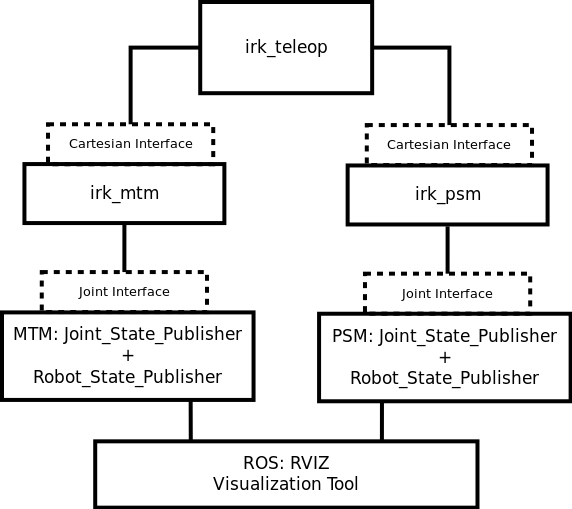
irk_model: all CAD models, URDF (robot description) files are in the irk_model package.
-
irk_model: this package includes logic robot witch connects to joint interface and provides a Cartesian interface.
-
irk_teleop: the irk_teleop package has teleoperation control logic and a GUI as input device, it also displays MTM and PSM end effector position.
Control diagram:
TODO_HOW_TO_CONNECT_TO_REAL_ROBOT
- Give two MTM / PSM example
- Add Gazebo simulation (Physics)
Please email me if you have questions or are interested to do some simulation work. Email: [email protected]

Community
Getting Started
- First Steps
- Software installation
- Controller Connectivity
- Configuration files
- Hardware Setup
- Calibration
- Classic/Standard
- Si
- Examples
Advanced
- Software Architecture
- Application Development
- APIs
- UI Customization
- Teleoperation
- Kinematics Simulation
- Potentiometer Issues
- Development Branches
- Release Checklist
- Projects
- Controllers/versions
- E-STOP Wiring
- Full da Vinci System
- Head Sensor
- Foot Pedals
- Video
- Instruments
Miscellaneous
- Frequently Asked Questions
- User manuals Classic and Si moved
- QLA Heat Sink
- Build w/o ROS Linux Mac
- cisst
- JHU
Deprecated